Por que confiar nos seus negócios para nós?
Nós tiramos o pânico da aquisição. Temos em estoque milhões de peças difíceis de encontrar de nossas fontes confiáveis. Atualizamos nossas listagens de produtos em minutos e as compras on-line são concluídas em tempo real e enviadas todos os dias.
Fundada em 2002, a MFGChips é líder local em distribuição de componentes eletrônicos e também é reconhecida como uma das empresas mais respeitadas e inovadoras no mercado local atualmente. Com sede em Hong Kong, a MFGChips conquistou uma reputação impressionante por fornecer serviços excepcionais e desenvolver soluções de cadeia de suprimentos globais abrangentes e eficientes.
Saber mais >
HMI baseada em laptop para controle de velocidade e direção do motor DC
Os motores DC são geralmente controlados com interruptores ou botões para direção e um potenciômetro para velocidade.Embora o potenciômetro permaneça eficaz para regulação de velocidade, este sistema oferece uma alternativa, permitindo o controle de velocidade e direção de um motor DC (até 36V) diretamente através de um laptop.Integra uma placa Arduino Uno para comunicação serial com uma interface gráfica de usuário (GUI) desenvolvida em Processing.(Processing é uma linguagem de programação e ambiente de código aberto gratuito para a criação de gráficos, animações e aplicativos interativos.) A GUI funciona como uma interface homem-máquina (HMI) baseada em laptop, fornecendo controle de motor suave baseado em tela.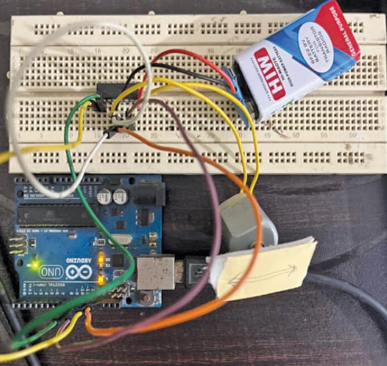
Os componentes necessários para montar o hardware estão listados na Tabela 1 da Lista de Materiais. Um protótipo do sistema do autor baseado em placa de ensaio é mostrado em Circuito e funcionamento
A Figura 2 mostra o diagrama de circuito da IHM baseada em laptop para controle de velocidade e direção do motor CC.O sistema é construído usando uma placa Arduino Uno (MOD1), o driver do motor L293D IC (IC1), um motor DC (M) e alguns componentes de suporte.Uma fonte de alimentação separada de 9V deve ser usada para o motor em vez de combiná-lo com a fonte de alimentação do Arduino.A placa Arduino requer uma fonte dedicada de 9V.Um cabo USB é usado para programação.
O sistema funciona através de comunicação serial entre a GUI do laptop e a placa Arduino.A GUI envia comandos de controle para o Arduino através da porta serial USB.Ao receber esses comandos, o Arduino os interpreta e aciona o motor através do driver L293D.Especificamente:
Comando 0: Move o motor para frente
Comando 1: Para o motor
Comando 2: Inverte o sentido do motor
Comandos 3 a 255: Representam valores PWM para controle de velocidade
Programas
Dois conjuntos de códigos são usados neste sistema: